


行业新闻
人工智能在自动驾驶应用中关键技术的分析(2)
日期:2018-12-06
来源:九游会J9
自动驾驶是让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆 。 按照SAE(美国汽车工程师协会)的分级,共分为:驾驶员辅助、部分自动驾驶、有条件自动驾驶、高度自动驾驶、完全自动驾驶五个层级。
第一阶段:驾驶员辅助 目的是为驾驶者提供协助,包括提供重要或有益的驾驶相关信息,以及在形势开始变得危急的时候发出明确而简洁的警告。现阶段大部分ADAS主动安全辅助系统,让车辆能够实现感知和干预操作。例如防抱死制动系统(ABS)、电子稳定性控制(ESC)、车道偏离警告系统、正面碰撞警告系统、盲点信息系统等等,此时车辆是能够通过摄像头、雷达传感器获知周围交通状况,进而做出警示和干预。
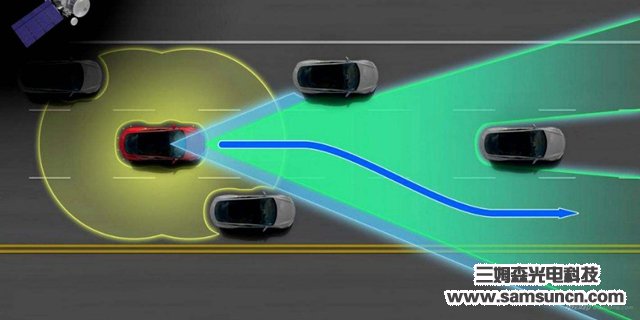
第二阶段:部分自动驾驶 车辆通过摄像头、雷达传感器、激光传感器等等设备获取道路以及周边交通信息,车辆会自行对方向盘和加减速中的多项操作提供驾驶支援,在驾驶者收到警告却未能及时采取相应行动时能够自动进行干预,其他操作交由驾驶员,实现人机共驾,但车辆不允许驾驶员的双手脱离方向盘。例如自适应巡航控制(ACC)、车道保持辅助系统(LKA)、自动紧急制动(AEB)系统、车道偏离预警(LDW)等。
第三阶段:有条件自动驾驶 由自动驾驶系统完成驾驶操作,根据路况条件所限,必要时发出系统请求,必须交由驾驶员驾驶。
第四阶段:高度自动驾驶 由自动驾驶系统完成所有驾驶操作,根据系统请求,驾驶员可以不接管车辆。车辆已经可以完成自动驾驶,一旦出现自动驾驶系统无法招架的情形,车辆也可以自行调整完成自动驾驶,驾驶员不需要干涉。
第五阶段:完全自动驾驶 自动驾驶的理想形态,乘客只需提供目的地,无论任何路况,任何天气,车辆均能够实现自动驾驶。这种自动化水平允许乘客从事计算机工作、休息和睡眠以及其他娱乐等活动,在任何时候都不需要对车辆进行监控。
 车辆实现自动驾驶,必须经由三大环节:
车辆实现自动驾驶,必须经由三大环节:
第一,感知。也就是让车辆获取,不同的系统需要由不同类型的车用感测器,包含毫米波雷达、超声波雷达、红外雷达、雷射雷达、CCD \CMOS影像感测器及轮速感测器等来收集整车的工作状态及其参数变化情形。
第二,处理。也就是大脑将感测器所收集到的资讯进行分析处理,然后再向控制的装置输出控制讯号。
第三,执行。依据ECU输出的讯号,让汽车完成动作执行。其中每一个环节都离不开人工智能技术的基础。
第一阶段:驾驶员辅助 目的是为驾驶者提供协助,包括提供重要或有益的驾驶相关信息,以及在形势开始变得危急的时候发出明确而简洁的警告。现阶段大部分ADAS主动安全辅助系统,让车辆能够实现感知和干预操作。例如防抱死制动系统(ABS)、电子稳定性控制(ESC)、车道偏离警告系统、正面碰撞警告系统、盲点信息系统等等,此时车辆是能够通过摄像头、雷达传感器获知周围交通状况,进而做出警示和干预。
第二阶段:部分自动驾驶 车辆通过摄像头、雷达传感器、激光传感器等等设备获取道路以及周边交通信息,车辆会自行对方向盘和加减速中的多项操作提供驾驶支援,在驾驶者收到警告却未能及时采取相应行动时能够自动进行干预,其他操作交由驾驶员,实现人机共驾,但车辆不允许驾驶员的双手脱离方向盘。例如自适应巡航控制(ACC)、车道保持辅助系统(LKA)、自动紧急制动(AEB)系统、车道偏离预警(LDW)等。
第三阶段:有条件自动驾驶 由自动驾驶系统完成驾驶操作,根据路况条件所限,必要时发出系统请求,必须交由驾驶员驾驶。
第四阶段:高度自动驾驶 由自动驾驶系统完成所有驾驶操作,根据系统请求,驾驶员可以不接管车辆。车辆已经可以完成自动驾驶,一旦出现自动驾驶系统无法招架的情形,车辆也可以自行调整完成自动驾驶,驾驶员不需要干涉。
第五阶段:完全自动驾驶 自动驾驶的理想形态,乘客只需提供目的地,无论任何路况,任何天气,车辆均能够实现自动驾驶。这种自动化水平允许乘客从事计算机工作、休息和睡眠以及其他娱乐等活动,在任何时候都不需要对车辆进行监控。
第一,感知。也就是让车辆获取,不同的系统需要由不同类型的车用感测器,包含毫米波雷达、超声波雷达、红外雷达、雷射雷达、CCD \CMOS影像感测器及轮速感测器等来收集整车的工作状态及其参数变化情形。
第二,处理。也就是大脑将感测器所收集到的资讯进行分析处理,然后再向控制的装置输出控制讯号。
第三,执行。依据ECU输出的讯号,让汽车完成动作执行。其中每一个环节都离不开人工智能技术的基础。
