


行业新闻
可移动单焊头焊网设备关键技术研究与应用
日期:2016-03-04
来源:九游会J9
摘 要: 本文提出的针对钢筋网焊接特点设计的工地用焊网设备采用类似打印机结构的单点焊接工艺方式,既解决了工地供电容量和场地的问题,又解决了生产大型网片的各 项困难,使用结果表明该套系统结构简单、控制性能良好、成本低,既能满足生产的要求又可将其运用于柔性制造系统,大大提高了设备利用率。关键词:移动 单焊头 焊网 研究 应用中图分类号:TP 273 文献标识码:A The Study and Application of Key Technology Moving Single Torch Welding Net Device CAO Meng-long (Qingdao University of science & technology, Qingdao 266042, China) Abstract: According to the characteristic of steel welding, the device was designed the same as the printer adopting resistance welding technique. This key technology has solved the problem of the power supply and the field. Large steel net can be producted by the device. The structure of this device is simple, the performance is good and the cost is low. The key technology makes the device used flexible and widely. Key words: moving single torch welding net study apply 引言[4] 钢筋焊接网是十九世纪中叶欧洲首创的一种在工厂中利用先进的微机编程控制技术、检测技术和气动技术,将普通低碳冷轧钢筋、冷轧带肋钢筋在纵横的交叉点处用 电阻熔接法焊接而成的网状钢筋制品。经近百年的应用与发展, 钢筋焊接网在国外已被建筑界广泛采用。国内近五、六年已建成50余家焊网厂,并将冷轧带肋钢筋焊接网技术列入建筑业“十项新技术”。国内所用的固定多焊头 焊网设备机体庞大、智能化程度不高、用电量高,不能直接应用于施工现场。可移动单焊头移动焊接关键技术的研究成果,填补了国内焊接领域该项技术的空白。针 对钢筋网焊接特点设计的工地用焊网设备采用类似打印机结构的单点焊接工艺方式,既解决了工地供电容量和场地的问题,又解决了生产大型网片的各项困难。整个 系统采用PC技术形成两级控制,应用变频调速方式进行网距自由定位,使网距任意可调,既提高了网距精度,又提高了网距控制的灵活性。 1 可移动单焊头焊网设备系统组成[1][2] 可移动单焊头焊网设备由焊网机器人本体和控制柜组成。图1-1为焊网机器人基本组成图。焊网机器人本体的机械结构主要是平行四边形结构形式。为了适应钢筋 焊网的焊接要求,参照国外焊接机器人的结构特点将焊头通过连接法兰固定于机器人最后一个轴的机械接口,使之能进行焊接。焊网机器人平行移动驱动采用交流变 频技术。由于交流电机没有碳刷,动特性好,使机器人不仅事故率低,而且免维修时间大为增长,加(减)速度也快,定位准确,振动小。焊网机器人固着焊头的机 械前臂用气缸驱动,可以上下移动。移动焊头和固定焊头闭合加压时,压力大小可以调节,在闭合时两电极是轻轻闭合,减少撞击变形和噪声。
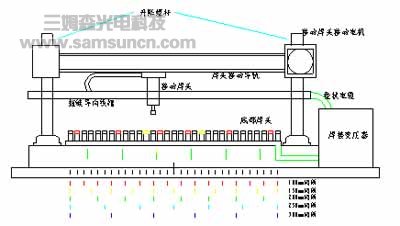

图1-1焊网机器人组成结构图 Fig.1-1 The frame of welding Robot 采取电阻焊工艺进行钢筋焊网焊接时机器人末端固定焊头的机械前臂在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间、提高工作效 率。针对钢筋焊网工艺特点设计的焊网机器人横向运动采用固定轨道,可以将电缆放入轨道槽中,避免电缆线随机器人运动而不停摆动,降低电缆的损坏率。由于采 用了一体化焊头,焊网机器人能够适应连续焊接时焊头短距离快速移位的要求,焊网机器人可在0.3s内完成50mm位移。焊网机器人本体控制由PLC完成, 其控制系统结构见图1-2:
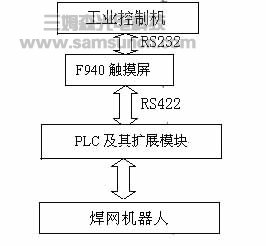
图 1-2焊网机器人控制系统结构图 Fig.1-2 The structure of control system for welding robot 2可移动单焊头关键技术解决方案[3] 焊网机器人要在移动的过程中实现定位焊接,对机器人固着焊头机械臂移动定位的控制是一个技术关键,焊网机器人电气控制系统配置图如图2-1所示。
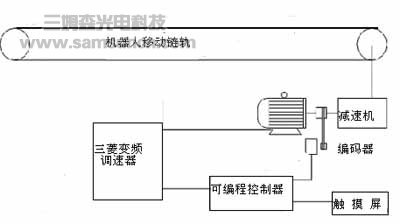
图2-1焊网机器人移动电气控制系统配置图 Fig.2-1 The electric system scheme chart of moving control for welding robot 进行焊接前,首先将横筋与纵筋搭接在固定电极排上,然后启动变频器驱动三相笼型交流异步电机,电机经蜗轮减速机减速后拖动机器人移动链轨,当机器人手臂上 的焊头(移动焊接电极)对准某一焊点(固定电极上横筋与纵筋交叉点)位置停稳后,机器人机械臂下压贴紧焊点,进行焊接。一个焊点焊接完了,机械臂抬起,链 轨将焊网机器人送到下一个焊接位置停稳,开始第二个焊点的焊接,这样周而复始,连续作业直到整片钢筋网焊接完毕。通常位置控制大多由计算机或PLC加模块 构成。传动部分对精度要求不高的采用非调速的交流传动,对定位精度和响应速度要求高的设备则采用直流调速传动。随着电子功率器件技术的发展,变频器性能不 断得到提高,而价格的迅速降低使变频调速技术得到了广泛的应用,在许多场所变频调速已经取代传统的直流调速。焊网机器人的这种移动定位控制便是由PLC和 变频器完成。首先依照焊网生产的规格要求从上位机配方数据库中下载焊接预期位置,即位置设定值。当PLC经运算后输出调节信号给变频器,变频器按照PLC 输出指令控制电机的加速、运行、减速和制动停止,最后使焊头停止在预期的设定位置上。在每一周期的开始,传动装置先根据速度预设定进行速度预控制。同时, 反馈回来的实际值与设定值进行比较计算,得出的偏差与比例增益相乘后叠加,得出传动装置应该具有的速度。经速度、电压转换和D/A转换后向移动系统发出控 制信号。机器人先以设定的加速度匀加速度运动,直至达到设定速度,然后匀速运动一定的时间,再以设定的加速度匀减速运动,直到速度变为0。速度到0时,轴 移动的距离正好是命令规定的两个焊点之间的脉冲差值。变频器输出变化曲线如图2-2所示。
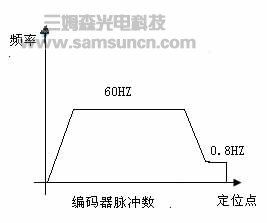
图2-2 变频器输出变化曲线 Fig.2-2 The output curve of transducer 3 结语采用单焊头移动焊接技术,缩小了焊网机的体积、降低了供电容量,可以在建筑施工现场使用。这样不但可以大大减少焊网的运输费用,还能适应建筑施工现场 随时变动的各种焊网的需求,是建筑焊网机设备的创新。使用结果表明,该套系统结构简单、控制性能良好、成本低,能满足生产的要求,而且可将其运用于柔性制 造系统,大大提高了设备利用率。该控制系统已投入运行,运行效果良好。已生产的钢筋网成品如图3-1所示。
图3-1 钢筋网成品图 Fig.3-1 Picture of steel sealing net production 参考文献: [1] 李凡,汪法根等,一种机器人特殊手部机构设计,机械设计与制造,Dec.2002 No.6 [2] 曹梦龙,智能焊网设备DDC控制系统的设计与实现,青岛科技大学报,第26卷,第3期2005,6,256-258. [3]韩军,PLC在变频调速仿形喷涂机器人控制系统中的应用,制造业自动化,第22卷第10期,2000,10,55-62 [4]王彬,我国焊接自动化技术的现状与发展趋势,焊接技术,2000,12,Vol.29,No.6
