


技术文章
一文了解工业机器人视觉系统
日期:2019-03-05
来源:九游会J9
很多机器视觉包含了时钟/计时器,所以检测操作的每一步所需要的时间都可以准确测量,从这些数据,我们就可以修改我们的程序以满足时间上的要求。通常,一个基于PC的机器视觉系统每一秒可以检测20-25个部件,与检测部件的多少和处理程序以及计算机的速度有密切关系。
工业机器人的眼睛视觉系统通常由以下构成
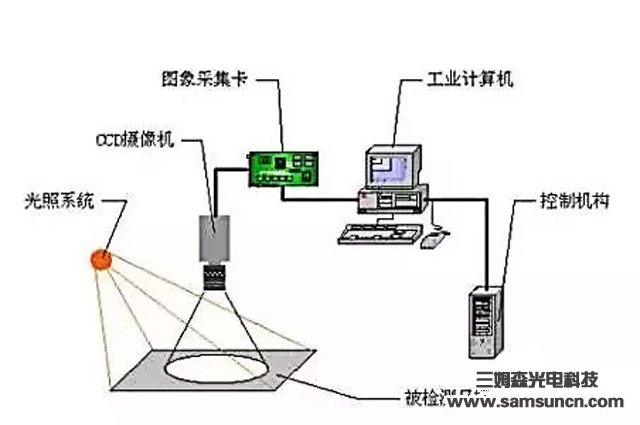 01、摄像头和光学部件
01、摄像头和光学部件
这一类通常含有一个或多个摄像头和镜头(光学部件),用于拍摄被检测的物体。根据应用,摄像头可以基于如下标准,黑白、复合彩色(Y/C),RGB彩色,非标准黑白(可变扫描),步进扫描(progressive-scan)或线扫描。
02、灯光
灯光用于照亮部件,以便从摄像头中拍摄到更好的图像,灯光系统可以在不同形状、尺寸和亮度。一般的灯光形式是高频荧光灯、LED、白炽灯和石英卤(quartz-halogen)光纤。
03、部件传感器
通常以光栅或传感器的形式出现。当这个传感器感知到部件靠近,它会给出一个触发信号。当部件处于正确位置时,这个传感器告诉机器视觉系统去采集图像。
04、图像采集卡
也称为视频抓取卡,这个部件通常是一张插在PC上的卡。
这张采集卡的作用将摄像头与PC连接起来。它从摄像头中获得数据(模拟信号或数字信号),然后转换成PC能处理的信息。
它同时可以提供控制摄像头参数(例如触发、曝光时间、快门速度等等)的信号。图像采集卡形式很多,支持不同类型的摄像头,不同的计算机总线。
05、PC平台
计算机是机器视觉的关键组成部分。
应用在检测方面,通常使用Pentium或更高的CPU。一般来讲,计算机的速度越快,视觉系统处理每一张图片的时间就越短。
由于在制造现场中,经常有振动、灰尘、热辐射等等,所以一般需要工业级的计算机。
06、检测软件
机器视觉软件用于创建和执行程序、处理采集回来的图像数据、以及作出“通过/失败(PASS/FAIL)”决定。
机器视觉有多种形式(C语言库、ActiveX控件、点击编程环境等等),可以是单一功能(例如设计只用来检测LCD或BGA、对齐任务等等),也可以是多功能(例如设计一个套件,包含计量、条形码阅读、机器人导航、现场验证等等)。
07、数字I/O和网络连接
一旦系统完成这个检测部分,这部分必须能与外界通信,例如需要控制生产流程、将“通过/失败(PASS/FAIL)”的信息送给数据库。通常,使用一张数字I/O板卡和(或)一张网卡来实现机器视觉系统与外界系统和数据库的通信。
工业机器人的眼睛视觉系统通常由以下构成
这一类通常含有一个或多个摄像头和镜头(光学部件),用于拍摄被检测的物体。根据应用,摄像头可以基于如下标准,黑白、复合彩色(Y/C),RGB彩色,非标准黑白(可变扫描),步进扫描(progressive-scan)或线扫描。
02、灯光
灯光用于照亮部件,以便从摄像头中拍摄到更好的图像,灯光系统可以在不同形状、尺寸和亮度。一般的灯光形式是高频荧光灯、LED、白炽灯和石英卤(quartz-halogen)光纤。
03、部件传感器
通常以光栅或传感器的形式出现。当这个传感器感知到部件靠近,它会给出一个触发信号。当部件处于正确位置时,这个传感器告诉机器视觉系统去采集图像。
04、图像采集卡
也称为视频抓取卡,这个部件通常是一张插在PC上的卡。
这张采集卡的作用将摄像头与PC连接起来。它从摄像头中获得数据(模拟信号或数字信号),然后转换成PC能处理的信息。
它同时可以提供控制摄像头参数(例如触发、曝光时间、快门速度等等)的信号。图像采集卡形式很多,支持不同类型的摄像头,不同的计算机总线。
05、PC平台
计算机是机器视觉的关键组成部分。
应用在检测方面,通常使用Pentium或更高的CPU。一般来讲,计算机的速度越快,视觉系统处理每一张图片的时间就越短。
由于在制造现场中,经常有振动、灰尘、热辐射等等,所以一般需要工业级的计算机。
06、检测软件
机器视觉软件用于创建和执行程序、处理采集回来的图像数据、以及作出“通过/失败(PASS/FAIL)”决定。
机器视觉有多种形式(C语言库、ActiveX控件、点击编程环境等等),可以是单一功能(例如设计只用来检测LCD或BGA、对齐任务等等),也可以是多功能(例如设计一个套件,包含计量、条形码阅读、机器人导航、现场验证等等)。
07、数字I/O和网络连接
一旦系统完成这个检测部分,这部分必须能与外界通信,例如需要控制生产流程、将“通过/失败(PASS/FAIL)”的信息送给数据库。通常,使用一张数字I/O板卡和(或)一张网卡来实现机器视觉系统与外界系统和数据库的通信。
