技术文章
Technical Articles
3D视觉传感器的精度是指什么?
经常听到有人问“3D视觉传感器/3D激光视觉传感器的精度是指什么?跟重复精度有什么区别?”“3D视觉传感器/3D激光视觉传感器线性度的定义?”等,今天小编带大家一次性搞懂这几个定义!
X 分辨率 = 视野宽度 /点数
-
点与点之间沿着激光线方向的水平间距
-
取决于3D视觉传感器沿着视野方向上对应的imager的像素个数
对宽度精度很重要
Z 向线性度
以被测输入量处于稳定状态为前提。在规定条件下,3D视觉传感器校准曲线与拟合直线间的最大偏差(ΔZmax)与满量程输出(Z,景深)的百分比,称为线性度。
δ=ΔZmax/ Z*100%
Z 分辨率和重复性
分辨率:是指3D视觉传感器可感受到的被测量值的最小变化的能力
-
稳定的测量环境
-
标准量块
-
多次重复测量
重复性
整个视野量程范围内,测同一物体,多次测量值的变动大小
另一种说法叫重复精度,注意区别于精度!重复性的目的只是要获知设备的变异性。
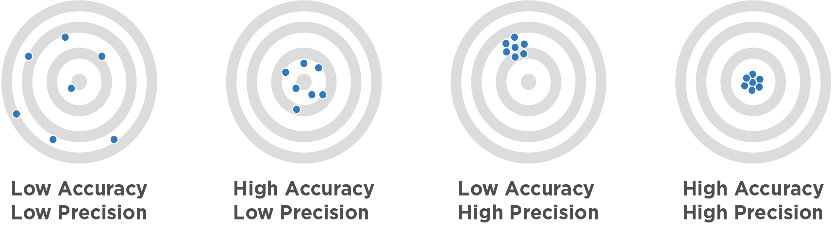
精度Precision
仪器的值与理论值之间的最大差值,由3D激光视觉传感器的基本误差极限和影响量(如温度变化、湿度变化、电源波动、频率改变等)引起的改变量极限确定。精确度,准确(性);数据稳定性
线性度Linearity
是描述3D视觉传感器静态特性的一个重要指标,以被测输入量处于稳定状态为前提。在规定条件下,3D视觉传感器校准曲线与拟合直线间的最大偏差(ΔYmax)与满量程输出(Y)的百分比,称为线性度(线性度又称为“非线性误差”),该值越小,表明线性特性越好。以上说到了“拟合直线”的概念,拟合直线是一条通过一定方法绘制出来的直线,求拟合直线的方法有:端基法、最小二乘法等等。
GRR 和相关性
GRR指“测量系统的重复性和复现性”,英文是Gauge Repeatability and Reproducibility,反映系统在短期的重复性和长期的稳定性。为计算重复性(Repeatability),在其取得数据时应符合
◆同一人员 ◆相同的归零条件
◆同一产品 ◆同一位置
◆同样的环境条件 ◆数据要在短时间内取得
再现性(Reproducibility)则希望获知不同条件下的变异,因此取得数据时应符合:
◆不同的人员 ◆相同的归零条件
◆ 相同的位置 ◆相同的环境
◆数据宜在较长期间内取得
相关性:两个或多个变量之间的线性关联程度。一般用相关系数来衡量。
准确性与精度图示